Project: Mechanical Robotic Arm
What I learned: Disc Cams, and Reverse Kinematics
Duration: 2 days
Age: 21
This project focused on studying the feasibility of creating a robotic arm driven by a single motor. In industry robotic arms are often used because they offer greater flexibility than conventional equipment. But during my work at Dennis Group I noticed clients often used robotic arms in repetitive task (but the task was still unique so a conventional approach could not be used) . Therefore I explored the idea of creating a Robotic arm that was driven by a single motor with each of its joints driven by disc cams to offer dependent differential motion. The advantages to this design would be:
- significantly reduced cost
- high IP rating due to limited complexity
- non technical maintenance
To determine if this was feasible, I created a virtual robotic arm given the repetitive task of creating pallets from cases. I then tracked each arms motion to determine the complexity. The virtual rig seen below had to:
- Place Cases in a 3×3 Pattern after rotating the Cases
- Place Slip Sheets between Case Layers
- Place New Pallet on bottom
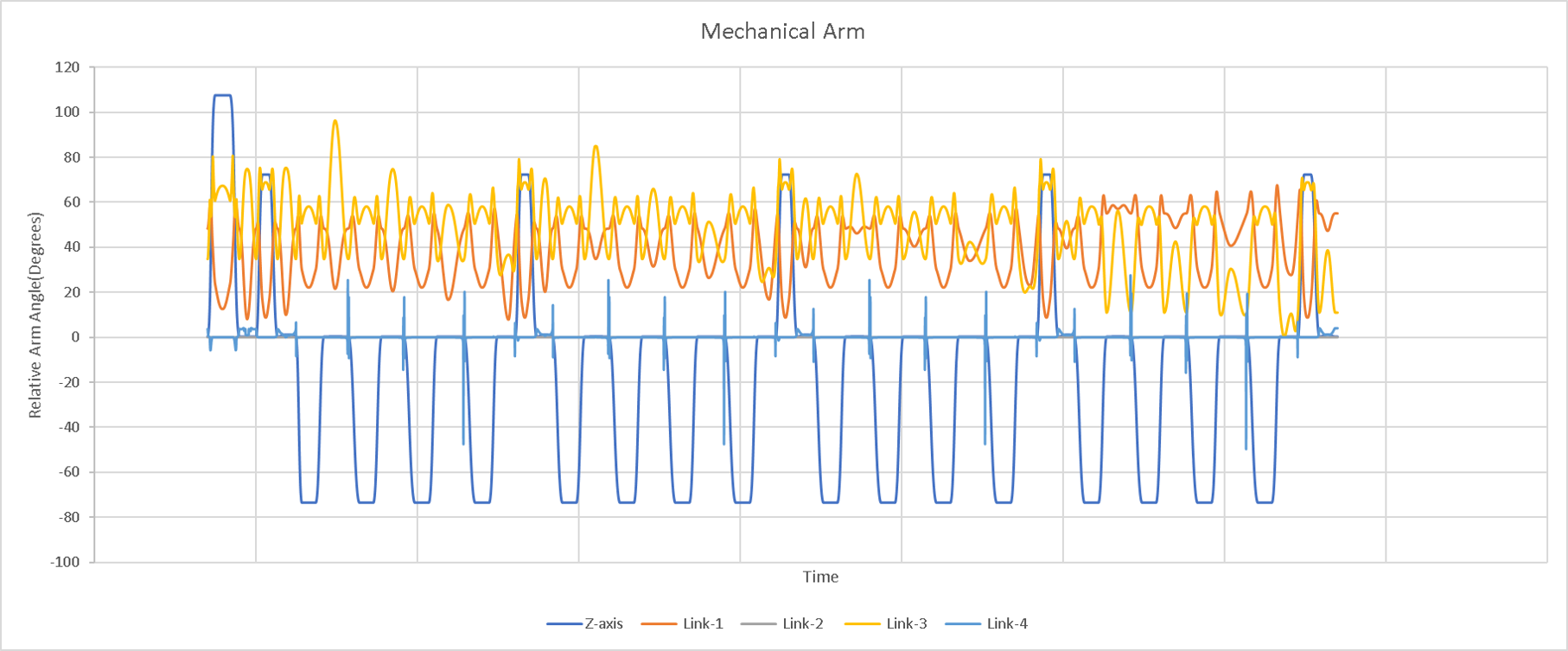
Plots of individual “Motors Angles” can be seen below. Note how although complex the motion is periodic and therefore suggest it would be possible to create a mechanism with a single drive.